
友人からの依頼
フリーフライト(模型航空)をやている白井さんから、電子デサマを作ってくれないかとの依頼を受け、チャレンジしています。
以前はデサマに火縄を使っている人が居たようですが、現在は少数で、ロータリーダンパと呼ばれる粘弾性シリコングリスを使ったヒンジを使っている人が多いようです。ただし、シリコングリスは温度によって特性が変化しますので、制御時間が安定しないようです。(元々の目的は、トイレの蓋のようにゆっくり閉める用途に使います)
今回のご依頼は、アクチュエーター(制御対象)としてRC(ラジコン)用サーボモータを使いたいとのことでしたので、RCサーボ用に電子タイマーを制作しました。
制御装置は、マイコンを使えば安価に簡単にできますが、1.タイマー設定の操作性が悪い。2.電池を外せばメモリーがリセットされる。3.水滴が掛かっただけで誤動作する。など、低価格マイコン特有の問題があるようなので、アナログ電子回路を使って制作しました。
この記事を見て自作されるのも良いし、軽量化・小型化・信頼性重視のSMT仕様の本格的な試作品の頒布も予定しておりので、ご興味のある方はどうぞ。

フリーフライト
フリーラートは上昇気流の力を借りて、長時間の飛行記録を競う競技です。エンジンやモーターは使いません。機体が軽いので上昇気流に攫われ、機体が回収できないこともあるそうです。
そのため火縄などを使って、故意に墜落させて機体を回収します。機体は軽いので墜落のダメージも殆どないそうです。

画像はクリックすると拡大されます。
デサーマル装置
略してデサマと言います。写真のように火縄をゴムで巻き付けてあり、時間が経てばゴムが焼け切れます。ゴムは主翼または尾翼の角度調整機構と連動しており、ゴムが焼け切れると、主翼または尾翼が、水平状態から垂直状態になり、揚力が無くなり飛行機は失速(落下)します。
火薬を使うので、動作時間は火薬の配合と火縄の長さなど、経験と勘を頼りにしています。記事を探しても中々お目に掛かれません。
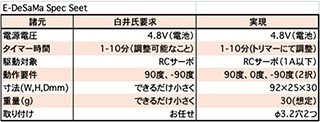
要求スペック
白井さんから頂いた要求仕様と実際に出来上がる予定のモノとの比較を示しています。
RCサーボとは
一般的にサーボモーターは、モーター軸にエンコーダ(センサー)を組み込んだもので、制御装置(コントローラ)によってエンコーダー情報から軸位置と回転方向、速度を割り出し、モーター電流と合わせPID制御(フィードバック制御)します。とてもではないですが、この小さな機体に搭載できません。
RCサーボはこれとは全く違い、DCモーターを応用したアクチュエータです。モーターのようにクルクルとは回転せず、軸が-90度、0度、+90度の三位置に廻ります。(特殊なものは回転するものもあります)減速機が内臓されており、軸トルクはかなりあり、指で止めるとモーターが回転してまう程です。消費電力も一番小さなサーボでも数百mA食います。
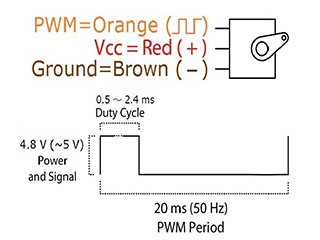
制御方法は規定されており、50Hzの基本クロックで、パルス幅によって制御します。パルス幅が0.5msec,1.45msec,2.4msで3方向に制御されます。サーボ自身にマイコンが搭載され、制御パルス信号を常時監視しています。制御信号は機種にもよりますが、CMOSレベル(3.3V)でも制御可能です。(機種によってはTTLレベル(5V)でないと動作しないものもある)なお、パルス幅はそれほど厳密にしなくとも動作します。
定価は知りませんが、秋月電子では多くのRCサーボを取りそろています。今回は、まずRCサーボを動かすところから勉強しました。

RCサーボの制御回路
マイコンで作ると楽ちんです。実は、Arduinoの学習キットで一通りのプログラミングを学習しており、その中でRCサーボも動かしています。ただ汎用ボードは5VのUSB電源で、今回ご要望のあった4.8V電池(NiCdかNMHだと思われる)では駆動できません。また、余りにも簡単で面白くないです。
今回はアナログ回路でやりたいと考えていますので、色々と先人のサイトも拝見致しました。ただ、最近の若者は説明が下手ですね。原理原則ではなく、自分が考案した回路を一生懸命説明しています。なので初心者にはさっぱり分からないでしょう。
こういうモノの説明は、自慢話ではなく、原理から正攻法で説明すべきです。また、回路によっては実験では上手く動いても、実用的には問題が起きそうな回路が散見されました。RCだけの回路では発振周波数は電源電圧の変動影響をモロに受けます。なので、真面目に正攻法を説明します。
また、部品が汎用品で安いので、正攻法で作ってもコストはさほど変わらないでしょう。こういう場合は、安全確実に動作するICメーカー推奨方法を選択します。
クロック発振にはタイマーIC555を使用します。電源変動の影響を受けず、高い精度で安定的な発振が可能です。発振回路は3つあります。回路の基本は555のデータシートに詳しい説明があります。555は多くのメーカーから互換品が出ています。今回は3.3Vで使用するので、CMOS版を使います。
LTSpiceによる事前検討
最初は50Hzの矩形波発振回路(U1)です。
デュティーは50%、トリガーだけなので厳密なデュティー比は不要です。データシートにある単安定マルチバイブレータを採用します。次は0.5msecのパルス発信機(U2)です。
トリガーはU1です。データシートにあるパルス幅変調回路を採用します。最後は2.4msecのパルス発信機(U3)です。
このトリガーもU1です。データシートにあるパルス幅変調回路を採用します。
一つだけ注意点があります。データシートに小さな字で注意書きがあるのですが、「トリガー信号」はパルス信号より短くてはなりません。即ち、50Hzの矩形波(パルス幅10msec)をそのままトリガーにしても、0.5-2.4msecのパルス信号は出てこず、50Hz信号が出るだけです。
この問題を解決するために50Hz矩形波はコンデンサーC10と抵抗R6を介して、エッジ信号のみ抽出しています。この問題解決に一ヶ月掛かりました。(データーシートはよく読むべきですね)
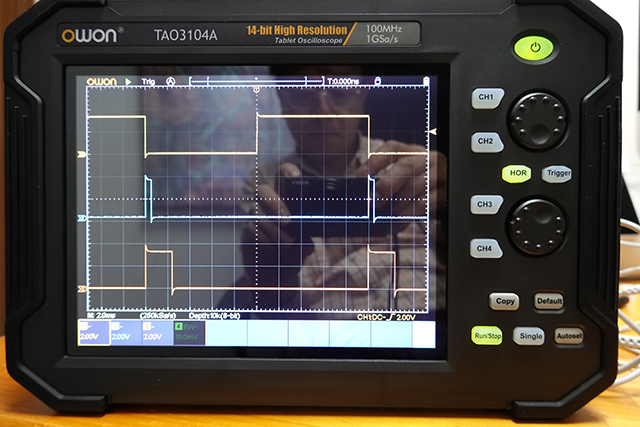
波形は、緑がU1からのトリガー信号、青がU2からの0.5msec幅パルス出力、赤がU3からの2.4msecパルス出力です。これで何とかRCサーボは制御できそうです。

画像はクリックすると拡大されます。

画像はクリックすると拡大されます。
タイマー部の回路
タイマーはIC555を使ったワンショット(単安定回路)です。分単位での動作、かつトリマー抵抗の値にも制限があることから、C=1000μFとして、抵抗値を決めています。(数MΩのトリマー抵抗があれば、コンデンサは100μFが使え随分と小型化できるのですが)
タイマー設定を間違えた場合を想定し、リセットスイッチを設けています。タイマー動作中は-90度、タイマーオフで+90度にRCサーボが回転するように設計しています。なお、パルス幅は0.5-2.4msecまでトリマー抵抗で可変可能です。(実際には、0.5,1.45,2.5msecの3段階)
IC555からの出力を反転させるためトランジスター回路を入れています。タイマーの出力と反転出力で、フォトリレーを駆動しています。フォトリレーによって、パルスを切り替える設計です。
フォトリレーを使う理由ですが、これはRCサーボからのノイズの影響をなくする為です。同様に、タイマー回路の電源は、3.3Vの低飽和レギュレーターで安定化を図っています。
事前のブレッドボードでの実験では、安定化電源がないとRCサーボの影響をもろに受けて、サーボがプルプルと不安定な状態になることが確認されています。
またRCサーボのノイズを極力少なくするように大小2つのコンデンサーを入れ、GNDラインも分けています。この辺りはちょしたノウハウです。
出来上がったブレッドボード用の回路図はこちらです。
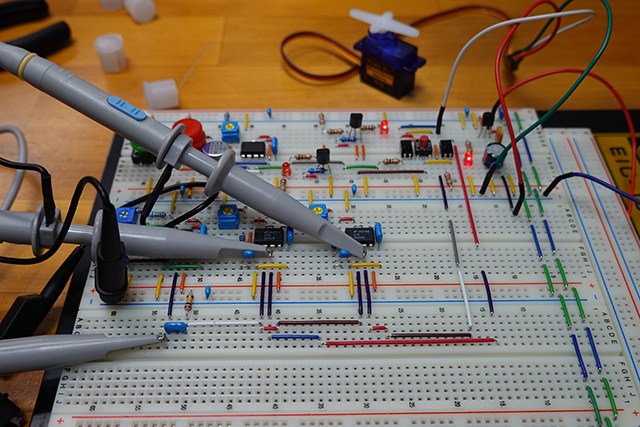
ブレッドボードによる試作
回路図を基にDIPサイズの部品を使って試作をしてみました。赤いボタンがリセットスイッチ、緑のボタンがタイマースイッチです。設定は1分にしてあります。RCサーボの動きに注目してください。
動作確認は終わりました。ご覧の通り、これではフリーフライトの機体には載りませんね。これから小型化のためにSMT(表面実装機)対応の部品に変更します。
画像はクリックすると拡大されます。
画像はクリックすると拡大されます。
KiCADによる基板設計
小型化に向けて部品を変更します。出力は基板用のオムロン製のワンタッチコネクターを使用します。このコネクターはハーネス(配線)の被覆を向いて差し込むだけで接続できます。ハーネス長はお客様で自由に調整できます。ここに電池とRCサーボを接続します。
コネクターと調整用のトリマー抵抗4個、押しボタンスイッチ2個を除いて、全て表面実装部品を使用します。IC555はTLC556という2個入りタイプに変更しています。トランジスターもデジトラアレイを使って1個に集約しました。
表示用のLEDもSMT品になりますが、赤と黄緑を使用しています。(3.3Vで駆動するため)1000μFコンデンサーもSMT品に変更しています。普通の電解コンではなく、固体ポリマー型で長寿命です。RCサーボ用のポリスイッチ(FUSEの代替品で自動復帰する)もSMT品を使っています。
回路図はこちらにあります。
現在、FUSION PCBに見積中ですが、完成予想図の3D_CAD図は下図になります。

画像はクリックすると拡大されます。

画像はクリックすると拡大されます。
試作基板
基板データ(ガーバー、ドリル図、部品リスト)が完成し、FUSION PCBに見積依頼中です。予定では、10枚試作して$350程度の予定です。送料込みで@4,000円程度になる見込みです。20枚の場合はさらに安くなります。10枚希望者が集まれば試作を開始する予定です。
試作には凡そ一ヶ月を見込んでいます。電子部品の需給が逼迫しており、さらに遅れる可能性もあります。
画像はクリックすると拡大されます。
画像はクリックすると拡大されます。
試作基板頒布のお知らせ
価格が決まりましたら、お知らせします。
トップ |
やまかず太陽光発電所 紹介ページ |
第一章 |
30Wベランダ設置型 太陽光発電システムの製作 |
第二章 |
噴水ポンプ、庭園灯、植物育成灯の制御基板の製作 |
第三章 |
100W屋根設置型 太陽光発電システムの製作 |
第四章 |
リモートモニタリングシステムの製作 |
第五章 |
市販チャージコントローラー 実試用評価 |
第六章 |
LED植物育成灯の製作 |
第七章 |
LED熱帯魚用灯の製作 |
第八章 |
蓄電池の大容量化に欠かせない循環電流防止装置 |
第九章 |
ベランダにフットする2倍電圧システムの製作 |
進化し続ける循環電流防止装置(理想ダイオード採用) |
|
ウィンカーランプのLED化に必須、ハイフラ防止装置の製作 |
お好きなページにどうぞ
ご訪問者のご記帳はこちらです。
この記事を参考にして製作される場合、次の点にご注意下さい。
・記載内容(材料や価格、加工や設置方法など)に関する保証は致しません。
・動作不良や機器故障、事故や損害等に関しての一切責任を負いません。
あくまで「自己責任」でお願いします。